Saya yakin dengan petikan Helen Keller yang menyatakan 'Satu-satunya perkara yang lebih buruk daripada buta adalah penglihatan tetapi tidak mempunyai penglihatan'. Teknologi ini dapat membantu orang kurang upaya menjalani kehidupan normal seperti yang dilakukan oleh manusia lain. Semua orang tahu gadis India bernama Arunima Sinha yang kehilangan kakinya dalam kemalangan kereta api dan dia terpaksa berjalan dengan kaki palsu sepanjang hayatnya. Selepas kemalangan, dia memutuskan untuk mendaki Gunung Everest dengan kaki palsu dan oleh itu, teknologi terkini membuka jalan baginya untuk mencapai impiannya.

Tongkat Pintar
Teknologi itu memang dapat meneutralkan kecacatan manusia; dengan ini, marilah kita menggunakan kekuatan Arduino dan sensor sederhana untuk membina tongkat Orang Buta itu boleh menjadi penyelamat bagi orang yang cacat penglihatan. Sensor Ultrasonik akan dipasang di tongkat yang akan merasakan jarak seseorang dari halangan apa pun, LDR untuk merasakan keadaan pencahayaan dan alat kawalan jauh RF yang dapat digunakan oleh orang buta untuk mencari tongkatnya dari jauh. Semua arahan akan diberikan kepada orang buta melalui Buzzer. Kita boleh menggunakan motor penggetar sebagai pengganti Buzzer dan lebih maju menggunakan kreativiti kita.

Smart Stick Untuk Orang Buta (Gambar Dengan hormat: Circuit Digest)
Bagaimana Menggunakan Arduino Dalam Merangka Litar?
Sekarang kerana kita mengetahui abstrak projek, mari kita maju dan mengumpulkan maklumat yang berbeza untuk mula bekerja. Kami akan membuat senarai komponen terlebih dahulu, kemudian mempelajarinya secara ringkas, kemudian mengumpulkan semua komponen untuk membuat sistem kerja.
Langkah 1: Komponen yang Diperlukan (Perkakasan)
- LDR
- Buzzer
- LED
- Pemancar dan Penerima Supperhetrodine
- Perintang
- Tekan butang
- Papan kenyataan
- Bateri 9V
- Multimeter Digital
- Pistol gam
Langkah 2: Komponen yang Digunakan (Perisian)
- Proteus 8 Professional (Boleh dimuat turun dari Di sini )
Selepas memuat turun Proteus 8 Professional, reka litar di atasnya. Kami telah memasukkan simulasi perisian di sini agar pemula merancang litar dan membuat sambungan yang sesuai pada perkakasan adalah lebih mudah.
Langkah 3: Mengkaji Komponen
Sekarang kerana kami telah membuat senarai semua komponen yang akan kami gunakan dalam projek ini. Mari kita melangkah lebih jauh dan menjalani kajian ringkas mengenai semua komponen utama.
- Arduino Nano: Arduino nano adalah papan mikrokontroler yang digunakan untuk mengawal atau menjalankan tugas yang berbeza dalam litar. Kami membakar a Kod C di Arduino Nano untuk memberitahu lembaga mikrokontroler bagaimana dan operasi apa yang harus dilakukan. Arduino Nano mempunyai fungsi yang sama persis dengan Arduino Uno tetapi dalam ukuran yang agak kecil. Mikrokontroler di papan Arduino Nano adalah ATmega328p.
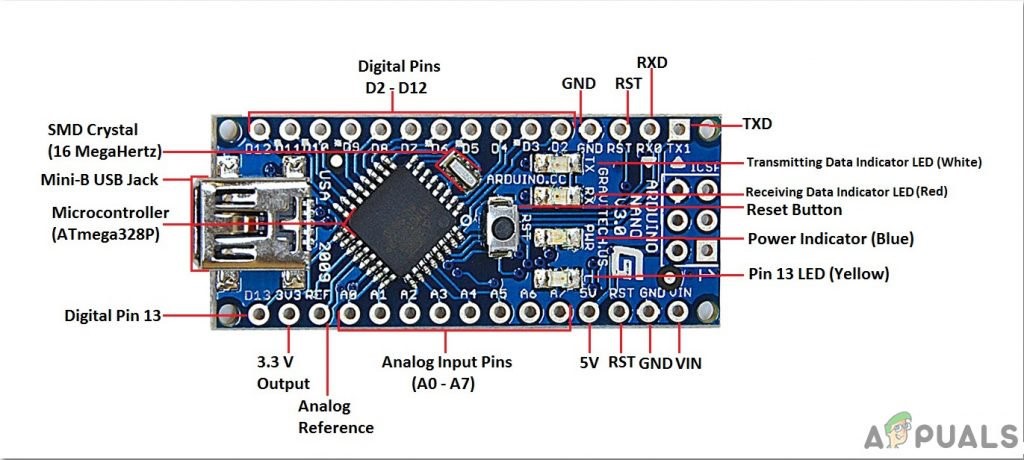
Arduino Nano
- Sensor Ultrasonik HC-SR04: Papan HC-SR04 adalah sensor ultrasonik yang digunakan untuk menentukan jarak antara dua objek. Ia terdiri daripada pemancar dan penerima. Pemancar menukar isyarat elektrik menjadi isyarat ultrasonik dan penerima menukar isyarat ultrasonik kembali ke isyarat elektrik. Apabila pemancar menghantar gelombang ultrasonik, ia memantulkan setelah bertembung dengan objek tertentu. Jarak dikira dengan menggunakan masa, yang memerlukan isyarat ultrasonik untuk pergi dari pemancar dan kembali ke penerima.

Sensor Ultrasonik
- Pemancar dan penerima RF 433mhz: Ia beroperasi pada frekuensi tertentu 433MHz. Terdapat beberapa peranti frekuensi radio lain yang tersedia di pasaran dan dibandingkan dengan mereka, prestasi modul RF akan bergantung pada beberapa faktor seperti ketika kita meningkatkan daya pemancar, jarak komunikasi yang besar akan dikumpulkan. Ini akan menyebabkan pengaliran kuasa elektrik yang tinggi pada peranti pemancar, yang menyebabkan jangka hayat operasi peranti berkuasa bateri lebih pendek. Sekiranya kita menggunakan peranti ini pada daya transmisi yang lebih tinggi, maka peranti tersebut akan menimbulkan gangguan pada peranti RF yang lain.

Pemancar dan Penerima RF
- Pengatur voltan 7805: Pengatur voltan mempunyai kepentingan penting dalam litar elektrik. Walaupun terdapat turun naik voltan masukan, pengatur voltan ini memberikan voltan keluaran yang tetap. Kami dapat mengetahui penerapan IC 7805 di kebanyakan projek. Nama 7805 menandakan dua makna, '78' bermaksud ia adalah pengatur voltan positif dan '05' bermaksud ia memberikan output 5V. Jadi pengatur voltan kami akan memberikan voltan keluaran + 5V. IC ini dapat menangani arus sekitar 1.5A. Heat sink disyorkan untuk projek yang menggunakan lebih banyak arus. Contohnya, jika voltan input 12V dan anda menggunakan 1A, maka (12-5) * 1 = 7W. 7 Watt ini akan hilang sebagai haba.
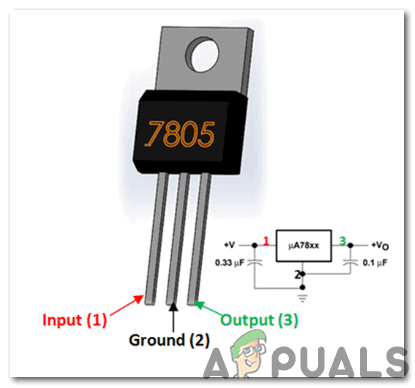
Pengatur Voltan




Langkah 4: Memasang Litar
Kita perlu merancang dua litar untuk projek ini. Litar pertama akan diletakkan di tempat yang sesuai di tongkat orang buta dan yang kedua akan menjadi Pemancar RF litar dan ia akan digunakan untuk mengetahui litar utama. Sebelum merancang litar di Proteus, kita perlu memasukkan perpustakaan proteus penerima RF dalam perisian. Anda boleh memuat turun perpustakaan dari Di sini dan setelah memuat turun perpustakaan buka Perpustakaan folder dan salin MODULO_RF.LIB fail dan tampalkannya di folder Perpustakaan Proteus. Sekiranya anda tidak menemui folder perpustakaan, klik pada (C: Program Files (x86) Labcenter Electronics Proteus 8 Professional PERPUSTAKAAN). Apabila anda telah selesai membuka folder MODELS ini dan salin RX.MDF dan tampalkannya di folder MODELS proteus. Sekiranya anda tidak menemui folder model, klik pada (C: Program Files (x86) Labcenter Electronics Proteus 8 Professional MODELS).

Diagram Litar (Gambar Dengan hormat: Litar Digest)
Mikrokontroler yang akan digunakan untuk mengawal semua sensor di litar adalah Arduino Nano. Bekalan kuasa yang digunakan untuk kerja litar ialah bateri 9V dan voltan 9V ini diturunkan ke 5V menggunakan a 7805 Pengatur voltan. Ia dapat dilihat di litar bahawa Sensor ultrasonik dikuasakan oleh Vout pengatur voltan. Pencetus dan pin gema sensor disambungkan ke pin 3 dan pin 2 dari Arduino. The Perintang Bergantung Cahaya (LDR) disambungkan ke potensiometer nilai 10k dan Analog hingga Digital pin penukaran A1 dari Arduino disambungkan ke titik itu untuk mengetahui perbezaan voltan. Kita perlu mengetahui isyarat yang dipancarkan oleh penerima RF sehingga kita telah menghubungkan ADC pin A0 untuk membaca isyarat dari penerima RF. Keluaran keseluruhan litar diberikan oleh pembesar suara jadi, pin positif buzzer disambungkan ke pin Arduino 12 dan pin negatif disambungkan ke permukaan sensor ultrasonik.
Kami belum memasukkan pemancar RF dalam rajah litar kami kerana kami akan memasangkannya pada perkakasan secara berasingan. Setiap kali kita menggunakan pemancar dan penerima superheterodyne 433 MHz, kita memerlukan pengawal mikro untuk menghubungkannya dengan itu tetapi dalam projek ini kita memerlukan satu-satunya pemancar yang menghantar isyarat kepada penerima, jadi, kita telah menghubungkan pin data pemancar dengan Vcc. Pin data penerima disalurkan melalui penapis RC dan kemudian disambungkan ke pin data A0 dari Arduino. Kami akan menekan butang tekan yang diletakkan pada pemancar berulang kali dan apabila butang ditekan, penerima akan memberikan nilai tetap sebagai output.

Pemancar RF
Langkah 5: Menyusun Perkakasan
Oleh kerana kami telah menjalankan simulasi, kami tidak dapat membuat prototaip. Semasa menyolder komponen pada papan Perf memberi perhatian khusus pada pin Arduino Nano. pastikan pin tidak saling menyentuh, jika tidak, Arduino boleh rosak. Cari tongkat di rumah anda dan pasangkan litar yang terdiri daripada penerima Arduino dan RF di atasnya. Anda boleh menggunakan pistol lem panas untuk memasang litar pada tongkat dan lebih baik meletakkan gam pada terminal positif dan negatif sehingga, kabel wayar mungkin tidak terlepas jika tongkat dipukul dengan kuat ke tanah.

Litar Dikumpulkan Pada Perkakasan (Gambar Dengan hormat: Litar Digest)
Langkah 6: Bermula dengan Arduino
Sekiranya anda tidak biasa dengan Arduino IDE sebelumnya, jangan risau kerana di bawah ini, anda dapat melihat langkah-langkah yang jelas untuk membakar kod pada papan mikrokontroler menggunakan Arduino IDE. Anda boleh memuat turun versi terbaru Arduino IDE dari di sini dan ikuti langkah-langkah di bawah:
- Apabila papan Arduino disambungkan ke PC anda, buka 'Panel kawalan' dan klik 'Perkakasan dan Bunyi'. Kemudian klik pada 'Peranti dan Pencetak'. Cari nama port yang menghubungkan papan Arduino anda. Dalam kes saya, ia adalah 'COM14' tetapi mungkin berbeza pada PC anda.
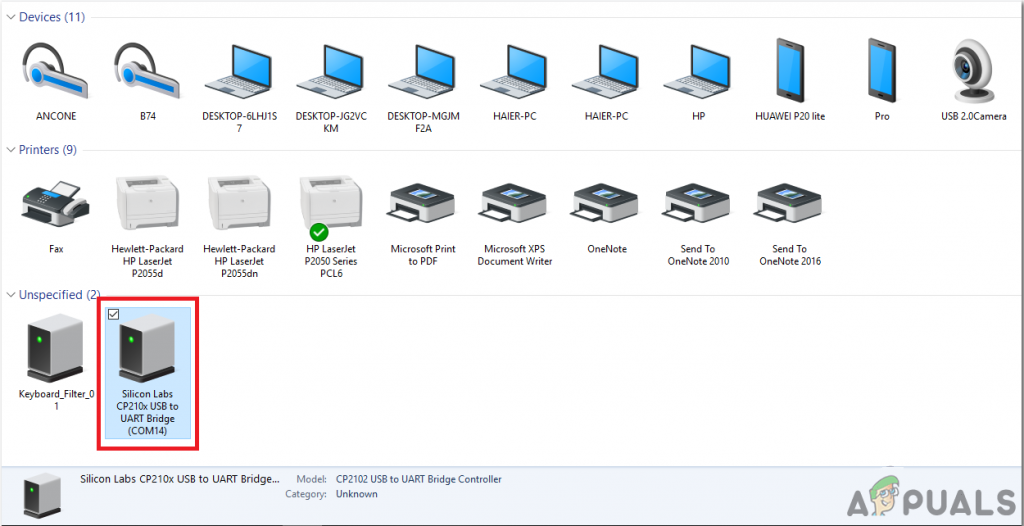
Mencari Pelabuhan
- Klik pada menu Alat. dan tetapkan papan ke Arduino Nano dari menu lungsur turun.
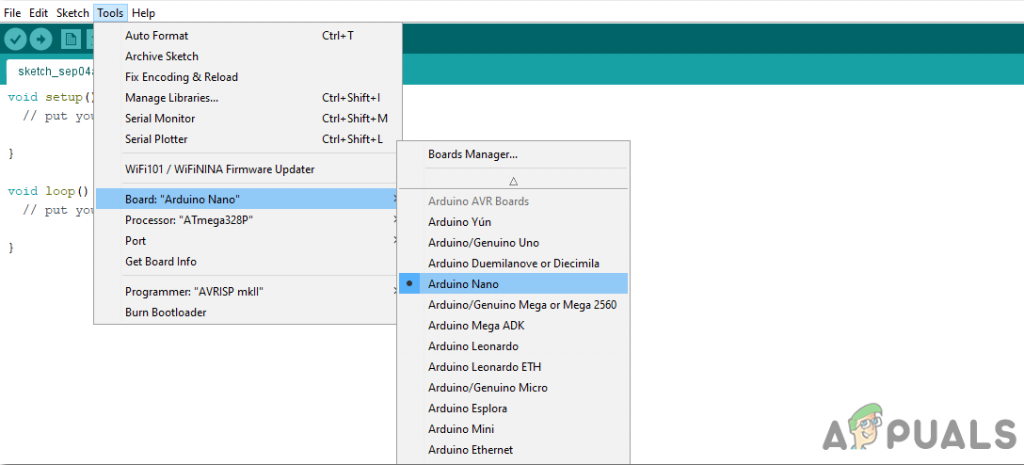
Menetapkan Papan
- Dalam menu Alat yang sama, tetapkan port ke nombor port yang anda perhatikan sebelumnya di Peranti dan Pencetak .
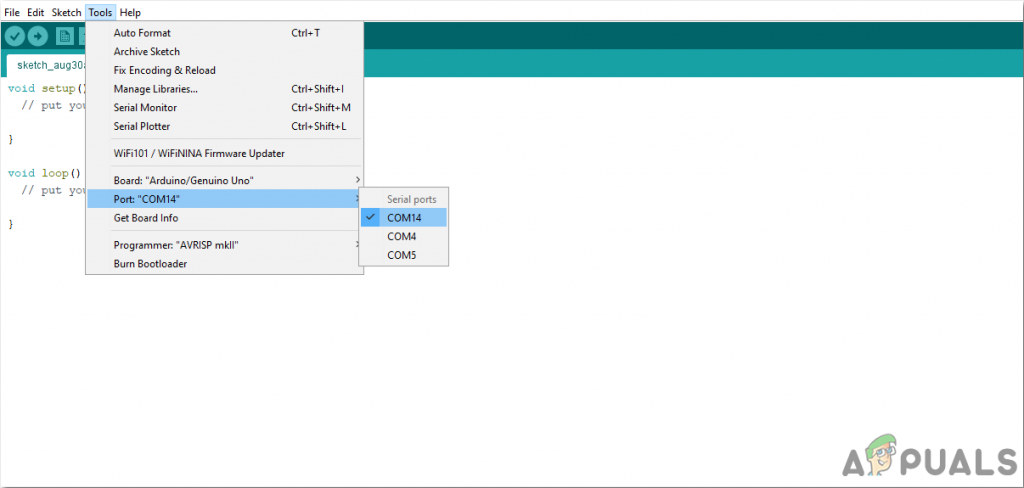
Menetapkan Pelabuhan
- Dalam menu Alat yang sama, Tetapkan Pemproses ke ATmega328P (Pemuat Boot Lama).
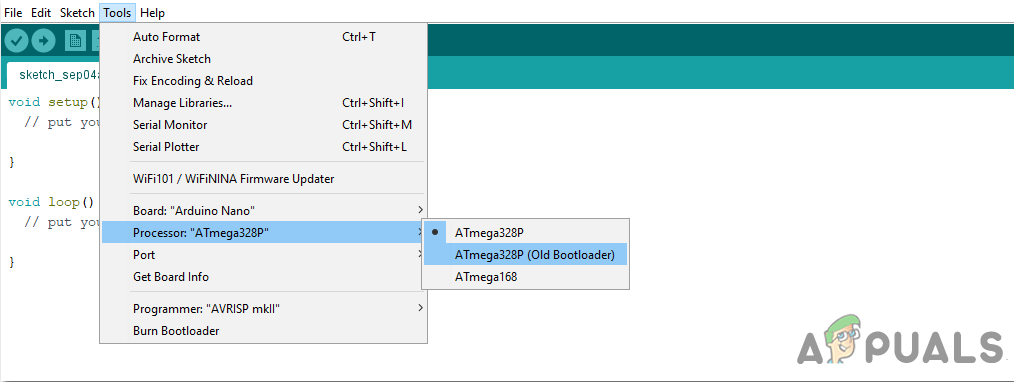
Pemproses
- Muat turun kod yang dilampirkan di bawah dan tampalkannya ke Arduino IDE anda. Klik pada muat naik butang untuk membakar kod pada papan mikrokontroler anda.
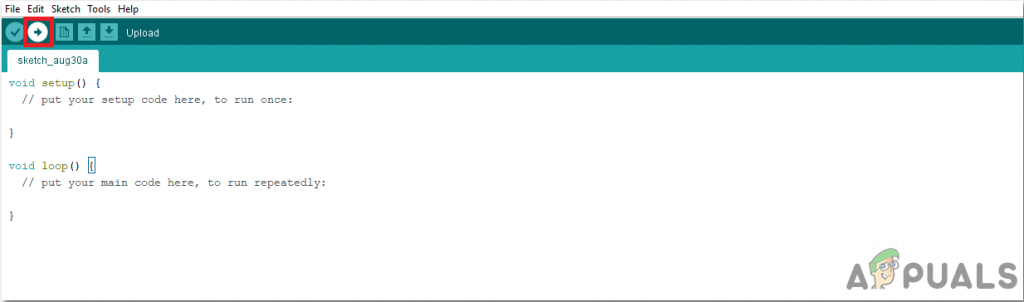
Muat naik





Untuk memuat turun kod, tekan di sini.
Langkah 7: Memahami Kod
Kodnya dikomentari dengan baik dan jelas. Tetapi tetap dijelaskan di bawah:
- Pada permulaan kod, semua pin papan Arduino Nano yang disambungkan ke sensor ultrasonik dan modul RF, diinisialisasi.
const int trigger = 3; // Pin pencetus 1st Sensor const int echo = 2; // Pin gema Sensor Pertama const di Buzz = 13; // Pin untuk menyambung buzzer const int Remote = A0; const int Light = A1; lama_digunakan; int dist; int Isyarat; int Intensif; int_kira serupa;
2. persediaan tidak sah () adalah fungsi yang digunakan untuk menetapkan al pin yang digunakan, sebagai MASUKKAN dan PENGELUARAN. Baud Rate ditentukan dalam fungsi ini. Baud Rate adalah kelajuan komunikasi di mana papan mikrokontroler berkomunikasi dengan sensor yang disatukan dengannya.
batal persediaan () {Serial.begin (9600); pinMode (Buzz, OUTPUT); digitalWrite (Buzz, RENDAH); pinMode (pencetus, OUTPUT); pinMode (gema, INPUT); }3. Sekarang, kita akan membuat fungsi yang akan mengira jarak.
batal hitung_jarak (int trigger, int echo) {digitalWrite (trigger, LOW); kelewatanMikrodetik (2); digitalWrite (pencetus, TINGGI); kelewatanMikrodetik (10); digitalWrite (pencetus, RENDAH); time_taken = pulseIn (gema, TINGGI); dist = time_taken * 0.034 / 2; jika (dist> 300) dist = 300; }Empat. gelung kosong () adalah fungsi yang berjalan berulang kali dalam satu kitaran. Dalam fungsi ini, kami memberitahu lembaga mikrokontroler bagaimana dan operasi apa yang harus dijalankan. Dalam gelung utama, kita akan membaca data sensor. Di sini, pertama, pin pemicu diatur untuk mengirim isyarat yang akan dikesan oleh pin gema. Beberapa keadaan diterapkan untuk membunyikan buzzer secara berterusan jika objek dikesan pada jarak tertentu. Bel akan berbunyi dengan bunyi kecil di dalamnya jika mengesan gelap dan akan berbunyi dengan rehat yang sedikit lebih besar jika mengesan terang.
gelung kosong () {// gelung tak terhingga hitung_jarak (pencetus, gema); Isyarat = analogRead (Jauh); Intens = analogRead (Cahaya); // Periksa sama ada Remote ditekan int temp = analogRead (Remote); jumlah_ramai = 0; sementara (Signal == temp) {Signal = analogRead (Jauh); jumlah_sama ++; } // Jika ditekan jauh jika (bilangan_sama<100) { Serial.print(similar_count); Serial.println('Remote Pressed'); digitalWrite(Buzz,HIGH);delay(3000);digitalWrite(Buzz,LOW); } //If very dark if (Intens800) { Serial.print(Intens); Serial.println('Low Light'); digitalWrite(Buzz,HIGH);delay(500);digitalWrite(Buzz,LOW);delay(500);digitalWrite(Buzz,HIGH);delay(500); digitalWrite(Buzz,LOW);delay(500); } if (dist<50) { Serial.print(dist); Serial.println('Object Alert'); digitalWrite(Buzz,HIGH); for (int i=dist; i>0; i--) kelewatan (10); digitalWrite (Buzz, RENDAH); untuk (int i = dist; i> 0; i--) kelewatan (10); } //Serial.print('dist= '); //Serial.println(dist); //Serial.print('Similar_count= '); //Serial.println(similar_count); //Serial.print('Intens= '); //Serial.println(Intens); }Langkah 8: Menguji
Oleh kerana kami telah memahami kodnya, memuat naiknya di mikrokontroler dan memasang perkakasan juga, kini saatnya untuk menguji projek kami. Sebelum menguji pastikan sambungan dibuat dengan betul dan sahkan kesinambungan litar menggunakan Digital Multi Meter. Untuk berpusing HIDUP kedua-dua litar menggunakan bateri 9V. Letakkan objek ke permukaan di mana anda menguji dan gerakkan sensor Ultrasonik di depannya dan diperhatikan bahawa bunyi buzzer meningkat ketika sensor bergerak lebih dekat ke objek. Terdapat dua kemungkinan jika LDR ditutupi gelap atau jika anda menguji cahaya matahari, bel akan mula berbunyi. Sekiranya butang tekan ditekan pada pemancar RF, bel akan berbunyi untuk waktu yang lama. Sekiranya bel terus berbunyi untuk waktu yang lama, ini bermaksud bahawa penggera dipicu secara salah. Sekiranya anda menghadapi kesalahan seperti ini, buka monitor bersiri dari Arduino IDE dan periksa parameter yang menyebabkan masalah seperti itu.

Menguji Perkakasan (Gambar Dengan hormat: Litar Digest)
Itu adalah kaedah paling mudah untuk membuat tongkat pintar untuk orang buta menggunakan Arduino. Ikuti semua langkah yang disebutkan di atas dan setelah berjaya menguji projek mencari orang kurang upaya dan tawarkan kepadanya projek ini untuk menjadikan hidupnya lebih mudah.