Jenayah jalanan sangat biasa berlaku pada abad moden. Semua orang perlu merasa aman ketika berada di rumah sama ada ketika tidur pada waktu malam atau pada waktu siang. Jadi, banyak sistem penggera keselamatan tersedia di pasaran. Sistem ini sangat cekap tetapi mahal. A pencuri penggera atau penggera pengganggu pada dasarnya adalah alat elektronik yang membunyikan penggera apabila mengesan penceroboh di rumah. Kita boleh membuat litar pengganggu penceroboh di rumah yang hampir sama berkesan untuk jarak tertentu dan kosnya sangat rendah.

Penggera Keselamatan
Artikel ini adalah mengenai membuat penggera pengganggu menggunakan sensor Arduino dan PIR. Apabila sensor PIR akan mengesan penyusup, ia akan menghantar isyarat kepada Arduino dan Arduino akan membunyikan penggera. Litar ini sangat mudah dan akan dirancang pada Papan Verob. Ini Papan kenyataan akan dipasang di tempat rumah di mana terdapat lebih banyak bahaya penceroboh masuk ke dalam rumah.
Bagaimana merancang Penggera Pengganggu berdasarkan Sensor PIR?
Pendekatan terbaik untuk memulakan sesuatu projek adalah dengan membuat senarai komponen dan menjalani kajian ringkas mengenai komponen-komponen ini kerana tidak ada yang akan mahu bertahan di tengah-tengah projek hanya kerana komponen yang hilang. Mari buat senarai komponen, beli dan mulakan projek. Papan Vero lebih disukai untuk memasang litar pada perkakasan kerana jika kita memasang komponen pada papan roti mereka mungkin terlepas dari itu dan litar akan menjadi pendek oleh itu, Veroboard lebih disukai.
Langkah 1: Mengumpulkan Komponen (Perkakasan)
- Perintang 10k-ohm
- LED
- Buzzer
- Bateri 9V
- Klip Bateri 9V
- Papan kenyataan
- Menyambung wayar
- Multi Meter Digital
Langkah 2: Komponen yang Diperlukan (Perisian)
- Proteus 8 Professional (Boleh dimuat turun dari Di sini )
Selepas memuat turun Proteus 8 Professional, reka litar di atasnya. Saya telah memasukkan simulasi perisian di sini supaya pemula dapat merancang litar dan membuat sambungan yang sesuai pada perkakasan.
Langkah 3: Mengendalikan Litar
Kerja litar ini sangat mudah. Pada mulanya, keadaan sensor PIR ditetapkan ke RENDAH. itu bermaksud bahawa tidak ada gerakan yang dikesan. Apabila gerakan akan dikesan oleh sensor PIR, ia akan menghantar isyarat ke mikrokontroler. Pengawal mikro kemudian akan menghidupkan buzzer dan LED. Sekiranya tiada gerakan dikesan, LED dan buzzer akan kekal dalam keadaan mati.
Langkah 4: Menyusun Komponen
Sekarang, seperti yang kita tahu sambungan utama dan juga rangkaian lengkap projek kita, mari kita maju dan mula membuat perkakasan projek kita. Satu perkara mesti diingat bahawa litar mestilah padat dan komponen mesti diletakkan begitu dekat.
- Ambil papan kenyataan dan gosokkan sisinya dengan lapisan tembaga dengan kertas pengikis.
- Sekarang Letakkan komponen dengan berhati-hati dan cukup dekat sehingga ukuran litar tidak menjadi sangat besar
- Ambil dua kepingan Header wanita dan letakkan di Papan Verob sedemikian rupa sehingga jarak di antara mereka sama dengan lebar papan nano Arduino. Kami kemudian akan memasang papan nano Arduino di tajuk wanita ini.
- Buat sambungan dengan berhati-hati menggunakan besi pateri. Sekiranya ada kesilapan semasa membuat sambungan, cuba hentikan sambungannya dan lakukan penyambungan semula dengan betul, tetapi pada akhirnya, sambungannya mesti rapat.
- Setelah semua sambungan dibuat, lakukan ujian kesinambungan. Dalam elektronik, ujian kesinambungan adalah pemeriksaan litar elektrik untuk memeriksa sama ada aliran arus di jalan yang diinginkan (itu pasti litar total). Uji kesinambungan dilakukan dengan menetapkan voltan kecil (berwayar mengikut susunan dengan LED atau bahagian yang membuat kekecohan, misalnya, pembesar suara piezoelektrik) melalui cara yang dipilih.
- Sekiranya ujian kesinambungan lulus, ini bermaksud bahawa litar dibuat dengan secukupnya seperti yang dikehendaki. Kini siap untuk diuji.
- Sambungkan bateri ke litar.
Sekarang sahkan semua sambungan dengan melihat gambarajah litar di bawah:

Rajah Litar
Langkah 5: Bermula dengan Arduino
Sekiranya anda belum biasa dengan Arduino IDE, jangan risau kerana prosedur langkah demi langkah untuk menyiapkan dan menggunakan Arduino IDE dengan papan mikrokontroler dijelaskan di bawah.
- Muat turun versi terbaru dari Arduino IDE dari Arduino.
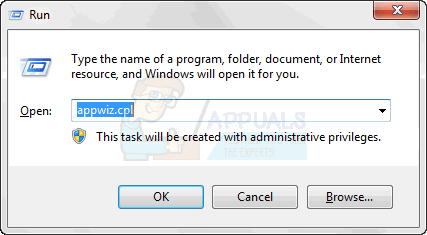
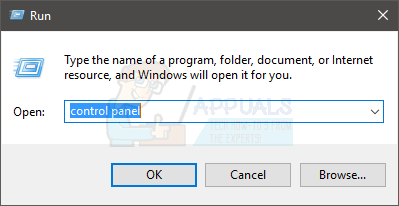
- Sambungkan papan Arduino Nano anda ke komputer riba anda dan buka panel kawalan. di panel kawalan, klik pada Perkakasan dan Bunyi . Sekarang klik pada Peranti dan Pencetak. Di sini, cari port yang menghubungkan papan mikrokontroler anda. Dalam kes saya adalah COM14 tetapi berbeza pada komputer yang berbeza.
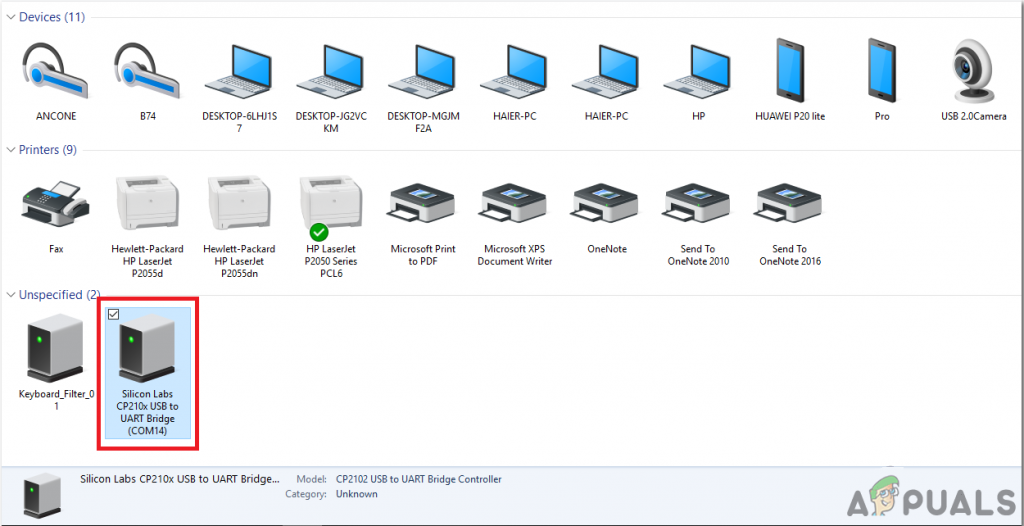
Mencari Pelabuhan
- Klik pada menu Alat. dan tetapkan papan ke Arduino Nano dari menu lungsur turun.
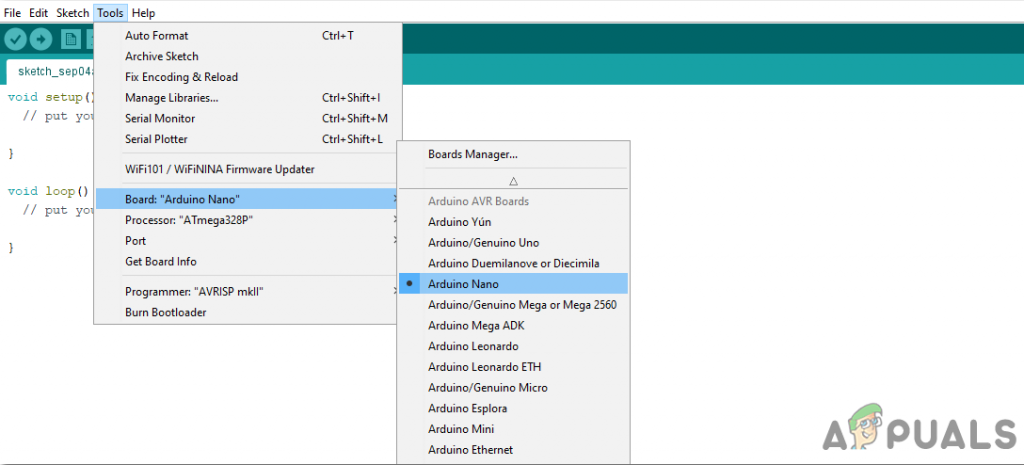
Menetapkan Papan
- Dalam menu Alat yang sama, tetapkan port ke nombor port yang anda perhatikan sebelumnya di Peranti dan Pencetak .
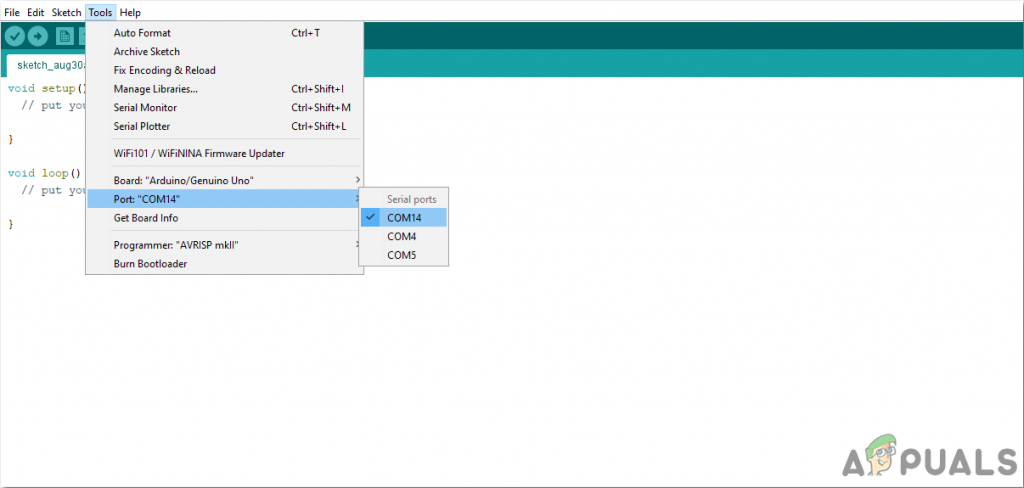
Menetapkan Pelabuhan
- Dalam menu Alat yang sama, Tetapkan Pemproses ke ATmega328P (Pemuat Boot Lama).
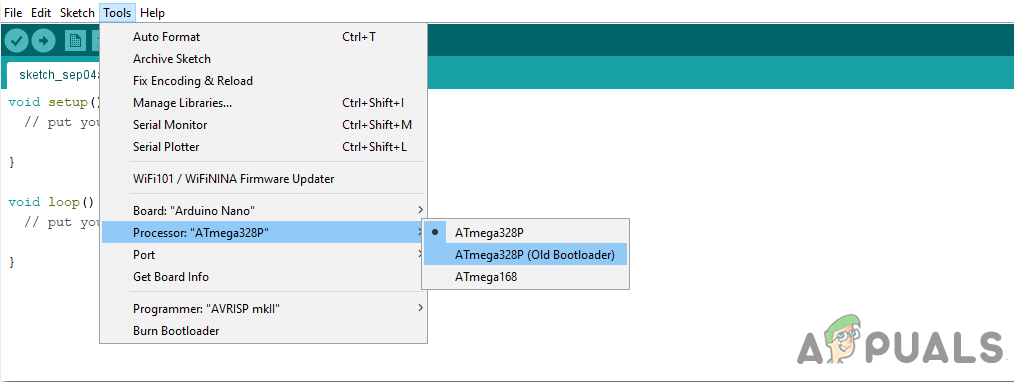
Pemproses
- Muat turun kod yang dilampirkan di bawah dan tampalkannya ke Arduino IDE anda. Klik pada muat naik butang untuk membakar kod pada papan mikrokontroler anda.
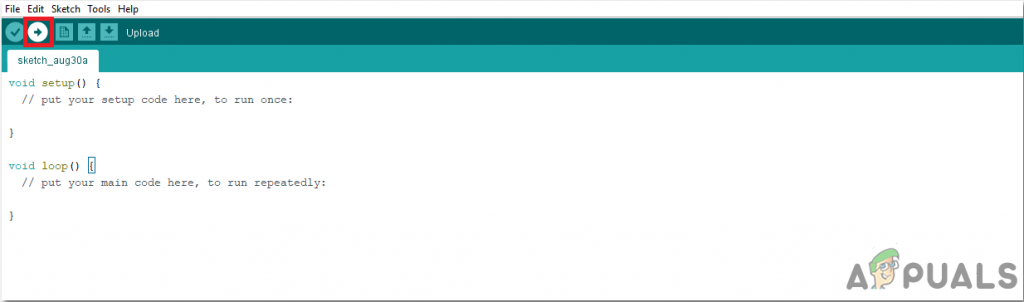
Muat naik





Untuk memuat turun kod, tekan di sini.
Langkah 6: Memahami Kod
Kod projek ini dikomentari dengan baik dan sangat mudah difahami. Tetapi masih, ia dijelaskan secara ringkas di bawah.
1. Pada permulaan, Pin Arduino diinisialisasi yang kemudian akan disambungkan ke LED dan buzzer. Pemboleh ubah juga dinyatakan yang akan menyimpan beberapa nilai semasa masa berjalan. Kemudian keadaan awal PIR diatur ke RENDAH, yang bermaksud bahawa diberitahu bahawa tidak ada gerakan yang dikesan pada mulanya.
int ledPin = 5; // pilih pin untuk LED int Buzzer = 6; // pilih pin untuk Buzzer int inputPin = 2; // pilih pin input (untuk sensor PIR) int pirState = RENDAH; // kita mulakan, dengan anggapan tidak ada gerakan yang dikesan int val = 0; // pemboleh ubah untuk membaca dan menyimpan status pin untuk penggunaan selanjutnya
2. persediaan tidak sah () adalah fungsi di mana kita menginisialisasi pin papan Arduino untuk digunakan sebagai INPUT atau OUTPUT. Baud rate juga ditetapkan dalam fungsi ini. Baud rate adalah kelajuan bit sesaat di mana mikrokontroler berkomunikasi dengan peranti luaran.
batal persediaan () {pinMode (ledPin, OUTPUT); // nyatakan LED sebagai output pinMode (Buzzer, OUTPUT); // nyatakan Buzzer sebagai output pinMode (inputPin, INPUT); // nyatakan sensor sebagai input Serial.begin (9600); // tetapkan kadar baud sama dengan 9600}3. gelung kosong () adalah fungsi yang berjalan berulang-ulang dalam satu gelung. Dalam fungsi ini, mikrokontroler diprogramkan sehingga jika ia mengesan gerakan, ia akan mengirimkan isyarat ke bel dan LED dan menyalakannya. Sekiranya gerakan tidak dikesan, ia tidak akan melakukan apa-apa.
gelung void () {val = digitalRead (inputPin); // baca nilai input dari sensor PIR jika (val == TINGGI) // Sekiranya gerakan dikesan sebelum {digitalWrite (ledPin, HIGH); // hidupkan LED ON digitalWrite (Buzzer, 1); // menghidupkan kelewatan ON Buzzer (5000); // buat kelewatan lima saat jika (pirState == RENDAH) {// jika keadaan rendah secara awal, bermaksud tidak ada gerakan yang dikesan sebelum // kita baru saja menghidupkan Serial.println ('Gerakan dikesan!'); // Cetak monitor bersiri bahawa gerakan dikesan pirState = TINGGI; // pirState ditetapkan ke TINGGI}} yang lain {digitalWrite (ledPin, LOW); // matikan LED MATI digitalWrite (Buzzer, 0); // matikan Buzzer MATI jika (pirState == TINGGI) {// jika keadaan TINGGI secara awal, bermaksud beberapa gerakan dikesan sebelum // kami baru saja mematikan Serial.println ('Motion berakhir!'); // Cetak pada monitor bersiri bahawa gerakan mempunyai ujung pirState = RENDAH; // pirState ditetapkan ke RENDAH}}}Jadi, ini adalah keseluruhan prosedur untuk membuat litar penggera keselamatan di rumah, menggunakan sensor PIR. Anda kini boleh mula bekerja dan membuat penggera keselamatan yang rendah dan cekap.
![TeamViewer Menawarkan Akses Percuma kepada Beberapa Pengguna Perniagaan Kerana Coronavirus [Tidak rasmi]](https://jf-balio.pt/img/news/62/teamviewer-offers-free-access-some-business-users-due-coronavirus.jpg)